Description:
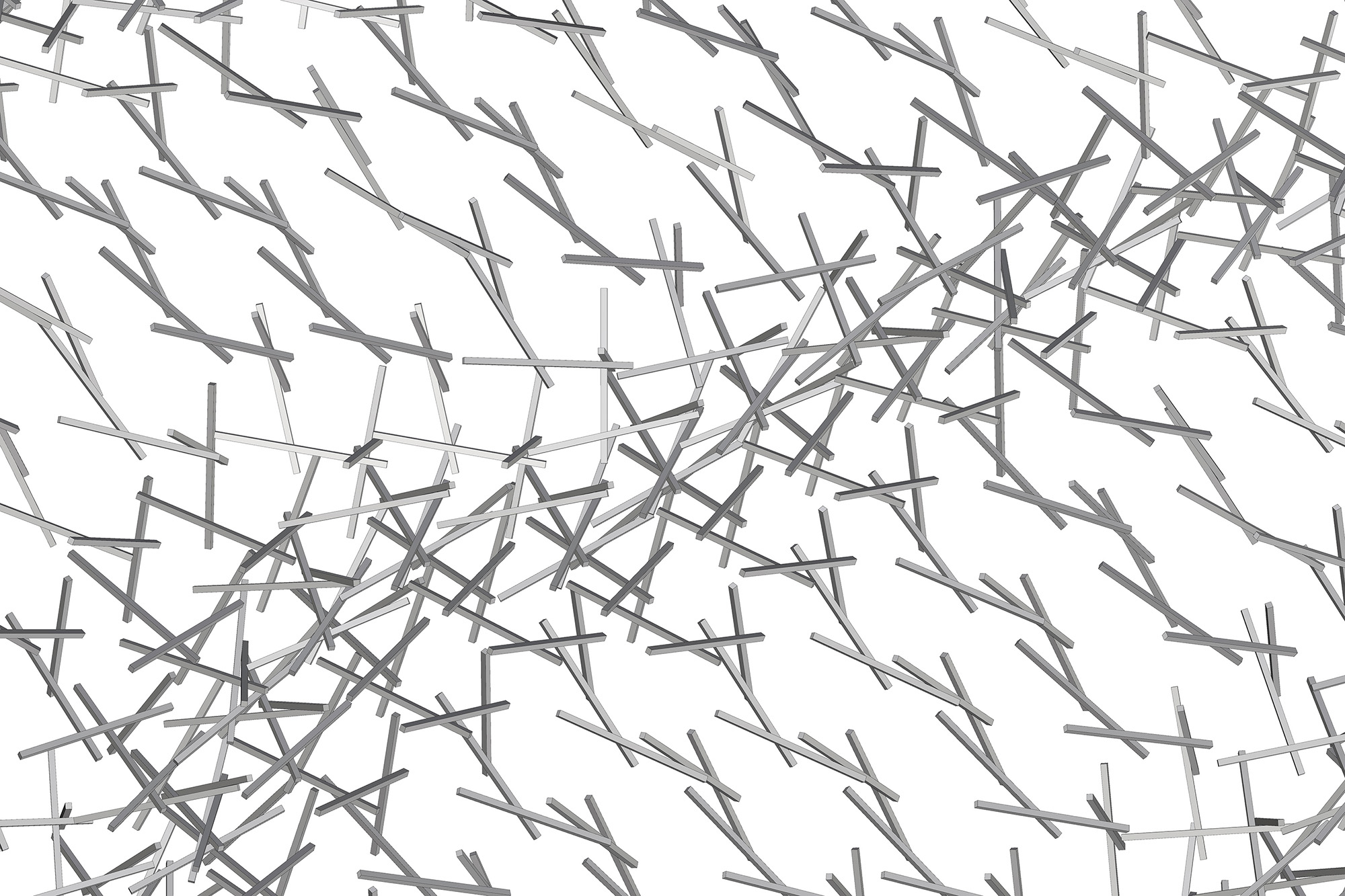
The workshop aim is to use custom developed computational tools to explore designs for spatial assemblies constructed as kinematic chains of discrete linear members – NOPA construction system.
Despite successful projects done in context of robotic fabrication in the past, behaviour of these structures and their true design potential for architecture is still poorly understood. This is party due to lacking or non-existing computational tools with which these structures can be explored. Although simple scripts can be used to quickly generate “valid” non-orthogonal planar-connected kinematic chains, precise control of the resulting structures requires systematic application of advanced mathematical techniques like inverse kinematics.
The emphasis of the workshop will lay in the development of computational design strategies for the NOPA construction system. The computational setup in Rhino and Grasshopper written in Python is fully developed by the tutors of the workshop and will enable the participants to quickly explore design iterations that follow the rules of the system. Given the flexibility and degrees of freedom this system offers, its design potential can only fully be explored in parametric three-dimensional environment.
Due to the limited time available for the workshop, it is not intended to extend this development into actual robotic fabrication of the physical prototypes, although digital simulation of the fabrication process could still be explored. Instead, manual models built out of rectangular wooden sticks can be used to facilitate spatial system thinking. Additionally, according to availability, evaluation of more complex design iterations can be done on 3D printed models.
NOPA is a construction principle based on two constraints:
- Member geometry – dictates that members are discrete, linear and rectangular in section, essentially straight beams.
- Connection type – dictates that members are connected by placing their length axes in parallel but offsetted planes, establishing a planar connection between the sides of the members.
From these two constraints all other properties of the NOPA construction system are derived:
– Generic connections – all connections are side-to-side and planar, therefore no cutting is required to shorten or angle the members. This makes every joint generic and cheap to implement in physical material systems.
– Scissors principle – given two disconnected members under any non-parallel rotation in space, it is always possible to connect them by using only two other members. These members form a scissors-type connection and although they always exist, they not necessarily always lay on the members themselves but rather on their geometric linear extensions.
– Kinematic chain – although the connections between elements are planar, the elements themselves are not. They build kinematic chains in which every element adds one degree of freedom and enables the structure to extend freely in space.
– Spatial truss with high degrees of freedom – as every element can connect in many directions with multiple other elements, this enables for construction of spatial trusses. Large degree of freedom in connections theoretically enables the structure to change its configuration under same boundary conditions, lending itself to be structurally optimized with various discrete element optimization methods.
Given two non-parallel members, there exist 16 different scissors configurations (each of the 4 sides of one member connected with each 4 sides of the other member) with continuous solution space. This gives 16 distinct ways to connect any two members within the NOPA system, with each of them having an infinite number of possible scissor connections (as the solution space is continuous).
It is not hard to see that even for a small number of members the number of their possible connections grows very fast. Dauntingly large number of connection options available in a structure suitable for architectural application is probably one of the reasons why NOPA construction principle remained until now rather unexplored.
Expected Skill Level: Advanced knowledge of Rhino and Grasshopper. Practical knowledge of at least one higher level programming language (C++, C#, Java, Python…) and basic familiarity with Python programming language.
Tutors:
Luka Piškorec and Selen Ercan


Bio:
Luka Piškorec studied architecture at the University of Zagreb in Croatia and worked in architectural offices in Croatia and Switzerland. He continued his studies at the ETH Zürich and received his Master of Science in Architecture (MSc ETH Arch) in 2011. During his studies, he concentrated on digital fabrication techniques as well as algorithmic programming procedures applied to architecture. He organized and led multiple international workshops on the related topics. In 2011 he started working as a research assistant at Gramazio Kohler Research at ETH Zürich. From 2011 to 2014, he was leading the Chair’s elective course and elective thesis workshops dealing with the development of robotic digital fabrication techniques and their implementation in architectural design. From 2015 to 2017 he was involved in organizing and teaching at the newly formed Master of Advanced Studies (MAS) in Architecture and Digital Fabrication, which is initiated by NCCR DFAB and conducted at ETH Zürich. In 2015 he co-founded the Zürich based TEN Association, a group dedicated to initiation and promotion of cultural ventures. Since 2017 he works as Lecturer in Design of Structures at Aalto University in Helsinki.
Selen Ercan is a trained architect and a digital fabrication researcher. She studied at METU and Delft University of Technology. She worked in various projects at the Chair of Architecture and Digital Fabrication at ETH Zurich exploring 1:1 scale robotic fabrication of complex building components and focusing on applying mobile robots for in-situ construction. She was a researcher and a project coordinator at the Future Cities Laboratory of the Singapore-ETH Centre (Design of Robotic Fabricated High Rises) leading the mobile robotic tiling project which exploits the commercial potential of applying automation in construction both in Europe and in Asia. At ETH Zurich, she assisted elective courses looking into the robotic cutting and assembly sequence of custom timber elements and has tutored workshops on digital fabrication processes at the Faculty of Architecture at Istanbul Bilgi University and at the Architecture Exhibition, La Biennale Di Venezia. Currently she is a researcher at ETH Zurich.