Workshops
Workshop 1

Tutors:
Daniel Piker, Emil Poulsen, James Solly, Cecilie Brandt-Olsen
Description:
This workshop will explore the different aspects related to the design of a bending-active gridshell with an emphasis on using Kangaroo2 and K2Engineering as interactive form-finding and analysis software. The design process includes the development of an architectural concept, creating small scale models, form-finding, loading analysis, structural design verification, fabrication strategy and eventually assembly of a full-scale prototype…
Workshop 2

Tutors:
Jens Pedersen and Spyros Efthymiou
Description:
This workshop will playfully explore the simulation and construction of flexible forms (developable, tensile and inflated), and the heterogenous spatial effects achievable through mixed-material construction. We recognise that these hybrid forms are by their nature less precise than other construction techniques, and have chosen to embrace this characteristic. They will be employed as a prototypical construction system that allows us to explore…
Workshop 3

Tutors:
Tom Van Mele and Matthias Rippmann
Description:
During this workshop participants learn how to address advanced research questions in architectural geometry and structural design through computation. On the first day, we will set up a development environment for scientific programming that will be used throughout the workshop, followed by a “scientific Python 101” and an introduction to COMPAS, an open source, Python-based framework for “computational research and…
Workshop 4

Tutors:
Subhajit Das, Arefin Mohiuddin
Description:
A single parametric model generates an infinite number of concrete designs. Which are “best”? Which are “good”? Which are “interesting”? This workshop focuses on two things. First, it focuses on how designers work with multi-criteria optimization. Second, it will demonstrate concepts and techniques for design exploration using an on-line gallery system that can, in principle, work with any parametric modeller. …
Workshop 5

Tutors:
Pierluigi D’Acunto, Patrick Ole Ohlbrock, Jean-Philippe Jasienski, Giulio Piacentino
Description:
The aim of this workshop is to introduce the participants to a novel design method for the generation of equilibrated structures in three-dimensions based on Combinatorial Equilibrium Modelling (CEM). CEM is an innovative approach to structural design in which, contrary to other equilibrium-based form finding approaches (such as particle-spring systems, force density method and dynamic relaxation), the equilibrium condition is inherent to the model and does not require any numerical simulation to be computed. …
Workshop 6

Tutors:
Jaime De Miguel and Maria Eugenia Villafañe
Description:
We are witnessing a revolution in the implementation of machine learning, and most specially neural networks, for solving problems of geometrical complexity and data manipulation inherent to pattern recognition of not only 2d images but also various types of manifolds such as 3d geometry and graphs – within a wide variety of geometrical domains. But beyond the training involved in the initial tasks of recognising patterns, the most promising techniques of neural networks in Design rely on the ability for them to become generative. …
Workshop 7

Tutors:
Pieter Francois Theron Burger, Jan Philipp Drude, Tim Germershausen and Marc Schulz
Description:
The workshop aims at animating a networked aggregation of soft robots as a responsive architectural installation. Soft robots based on compliant mechanisms like pneumatic muscles offer actuation with low mechanical complexity¹. They are robust and cheap but often fuzzy interms of precision and predictability. This deficit is compensated by sensor feedback loops. …
Workshop 8

Tutors:
Anna Bauer, Riccardo La Magna and Philipp Längst
Description:
The workshop will explore meshfree modelling and simulation of complex structural systems with the Isogeometric Analysis method. Isogeometric Analysis (IGA) is a new and innovative computational approach within Finite Element Analysis, which allows to perform simulations of structural behaviour directly on the NURBS parametrization of CAD geometry objects. The workshop will use Kiwi3d, a new IGA plugin for Rhino and Grasshopper developed by the organizers. …
Workshop 9

Tutors:
Delia Dumitrescu, Erica Hörteborn (Henrysson), Chris Williams and Malgorzata Zboinska
Description:
This workshop will explore the design processes and tools related to textile architecture formed by wind. On one hand, we will focus on how the internal structure of textiles can affect their behaviour and geometric expression when in movement. On the other, we will experiment with diverse tools useful for designing such textile architecture in movement, ranging from digital simulations of aesthetic expressions and behaviours, through structural property assessment, up to physical models set in motion by moving air. …
Workshop 10

Tutors:
Oliver Tessmann, Samim Mehdizadeh and Annie-Locke Scherer
Description:
The two-day workshop revolves around the design and fabrication of geometrically differentiated hollow nodal components that can be aggregated into larger structures. Participants will design the objects with the help of particle-spring models. They are made from an acrylic/plaster composite material that is cast into pre-tensioned hyper-elastic membranes that act as dynamic and flexible formwork. …
Workshop 13

Tutors:
Pierre Cuvilliers, Paul Mayencourt and Caitlin Mueller
Description:
This workshop will explore the design of bending-active structures with variable cross-sections to fit a target design shape. Over the two days, the participants will use computational form-finding tools for bending-active structures, and design and build an arc lamp. The participants will learn state-of-the-art methods for simulating bending-active behavior, and for the control and optimization of their equilibrium shapes. …
Workshop 15
Tutors:
Elena Shilova and Taole Chen
Description:
The aim of this workshop is to demonstrate an advanced interlocking strategy using robotic assembly for formwork and mortar free segmented shells. Participants will learn skills in computational design strategies and robotic fabrication. They will gain expertise in Grasshopper by working with algorithms specifically designed for the AAG workshop and first-hand experience using an industrial 6-axis robotic arm. …
Workshop 16

Tutors:
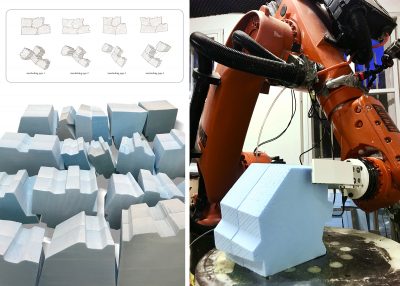
Eva Magnisali, Ed Tibuzzi and David Scott
Description:
Data-driven Robotic Carving (DRC) is a novel fabrication technique where intangible data get translated into robotic motion parameters that drive the kinematic solver of a 6-axis industrial robotic arm, resulting in the physical extraction of material and the generation of complex geometrical formations. In Data-driven Robotic Carving no prior complex description of a pre-generated morphology is required; instead, a bottom-up approach is applied, where the geometrical result is the direct outcome of the fabrication process and the robot’s possibilities and constraints. …
Workshop 17

Tutors:
Erik Martínez and Kyriaki Goti
Description:
The objective of the workshop is to explore the potential of robotic technology to assemble lightweight wooden structures with minimal scaffolding, through a collaborative workflow between robots and builder with an integration of material properties and construction sequences. We aim to robotically construct a series of small prototypes using thin wood shingles that will form panels which will be assembled manually into a larger piece. …